nav ✓ — 2241 areas / 3014 verticescalibration ✓radar PNG ✓
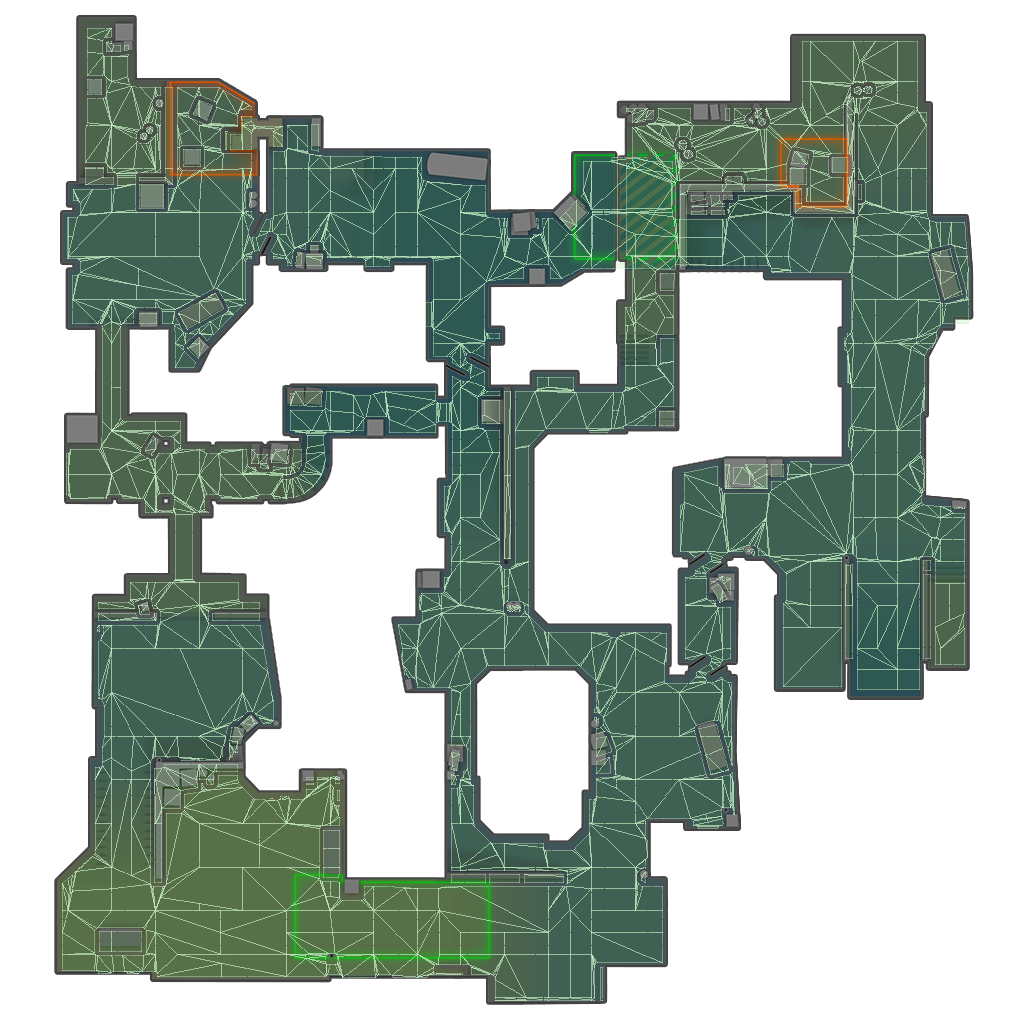
Navmesh (Source 2 .nav v35/v36) — bots' walkable areas
Green polygons = walkable areas (for bots). Not bullet obstacles — the nav-mesh skips low boxes a bullet flies over. For tracers use vphys (below).
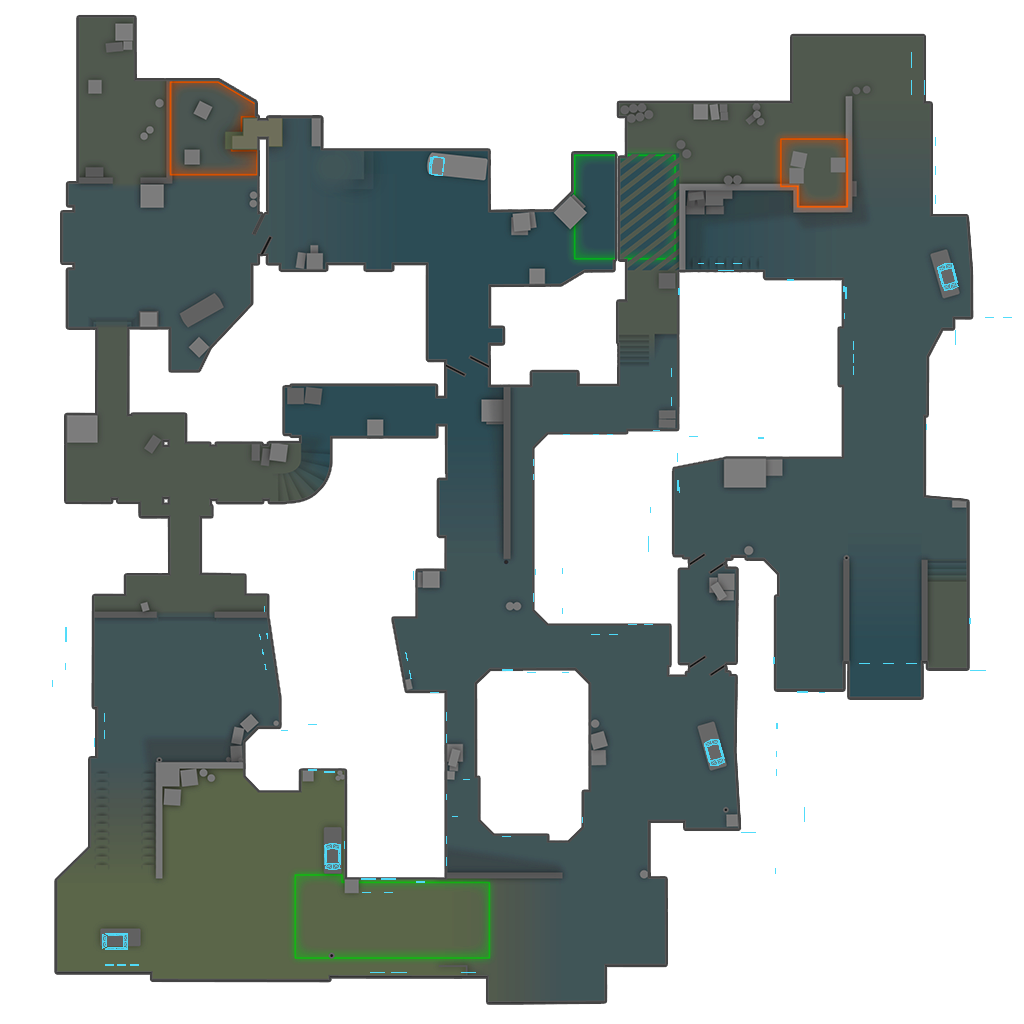
Glass — intact from vphys + break points from the DB
Cyan mesh — glass from the collision mesh (windows and glass props). Red dots — where glass was broken (aggregated by filter). Use the Mine/Pro/All radio below.
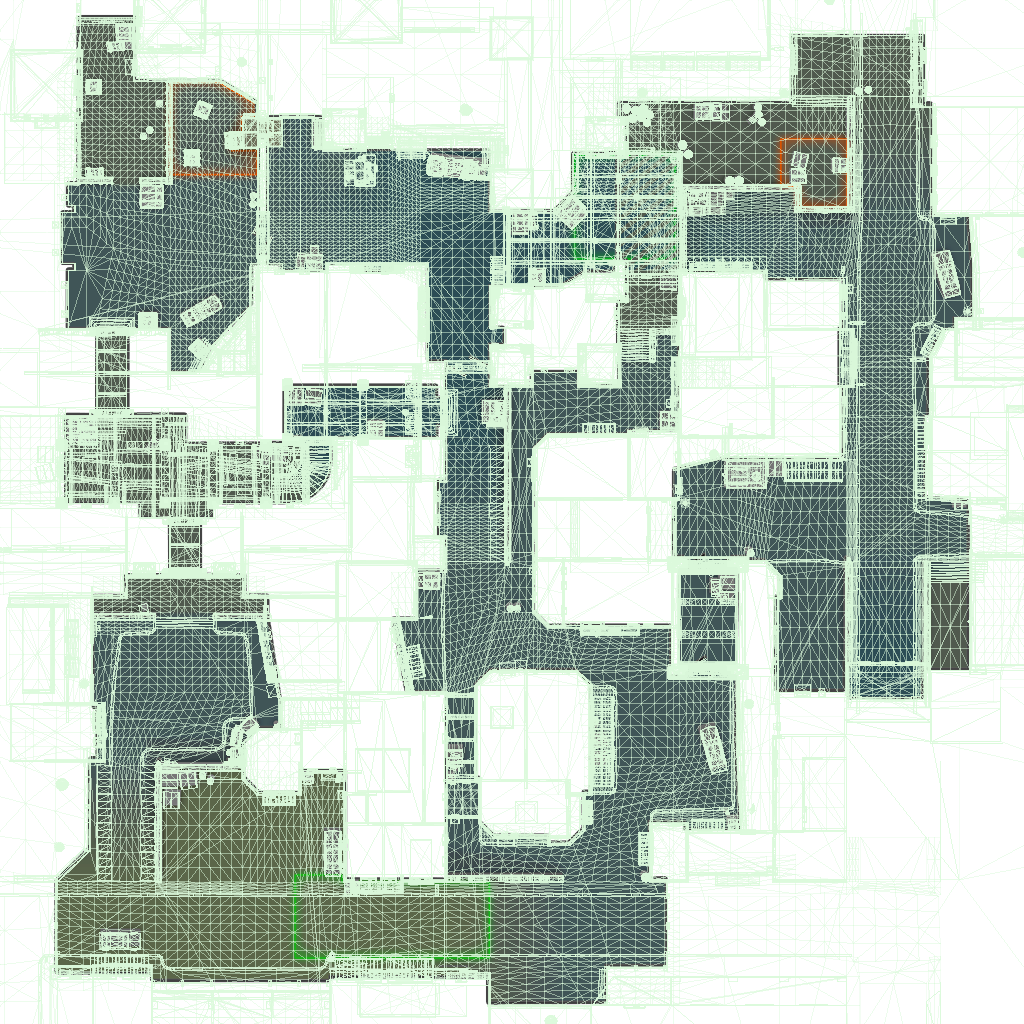
Collision geometry (vphys) — real walls, top-down projection
Every world collision triangle projected to XY. This is what a bullet stops against: walls, furniture, stairs, railings. Source: world_physics.vmdl_c → glTF via Source2Viewer-CLI.
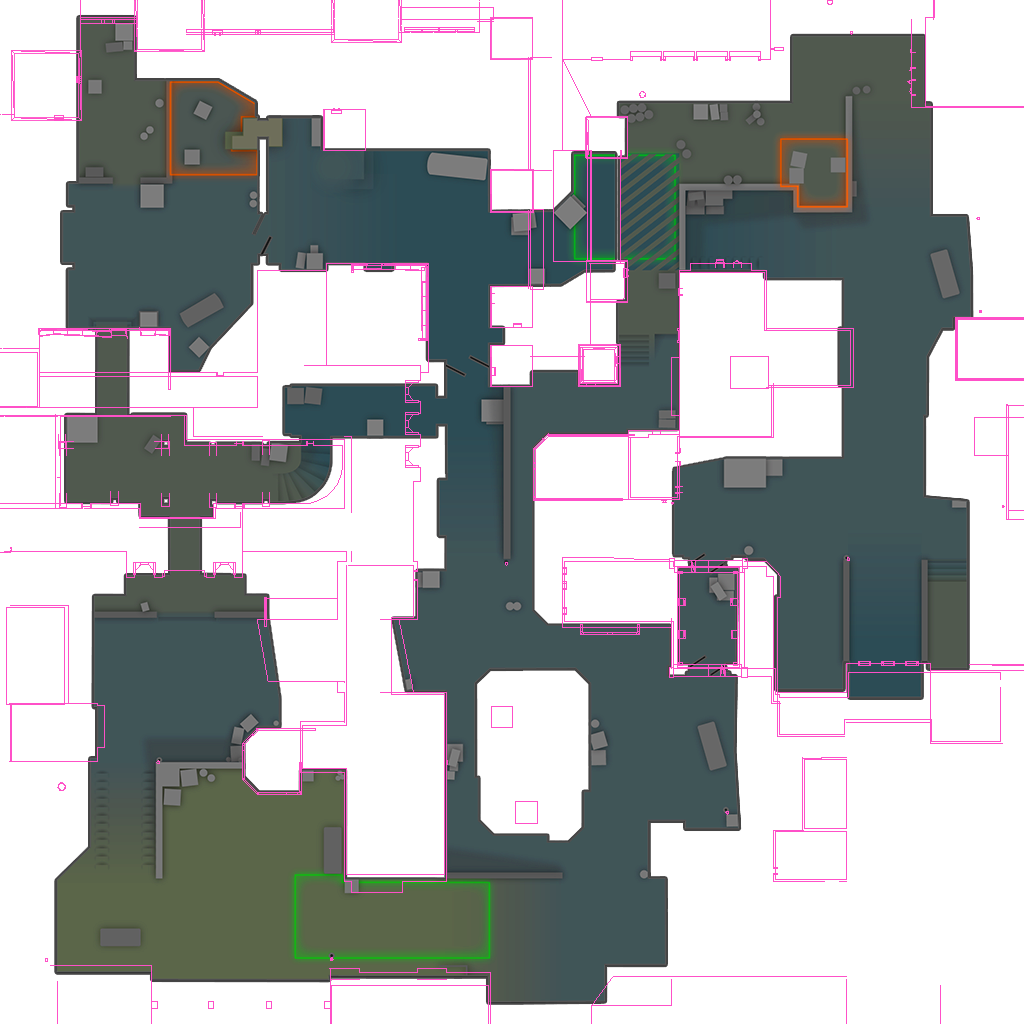
Height slice — walls at an exact Z
A horizontal "CT slice": only the vertical faces crossing the chosen height are drawn. Floors, ceilings and other storeys are hidden entirely. The slider is the "scout" — it always shows the wall at the current height plus every remembered one. Found a good height? Hit "Remember" (it joins the list). With 2-3 heights (one per storey), enable "Black fill" — a morphological closing extends walls across gaps and fills them solid, giving a precise underlay over the Valve radar (which misses some real walls).
With fill on, click the image to fill exactly that area, like a paint bucket (more reliable than auto-detection). Clicked points are remembered; "Clear points" resets them. With no points the auto mode uses "Fill side".